enumerate all types of joints
Members
-
AMotor
-
An Angular Motor joint between 2 rigid bodies
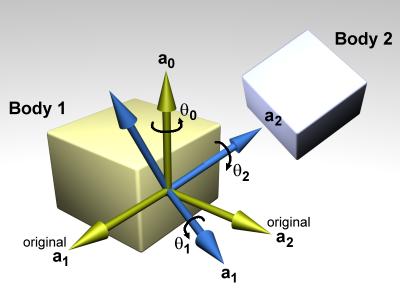 An angular motor (AMotor) allows the relative angular velocities of two bodies to be controlled.
An angular motor (AMotor) allows the relative angular velocities of two bodies to be controlled. -
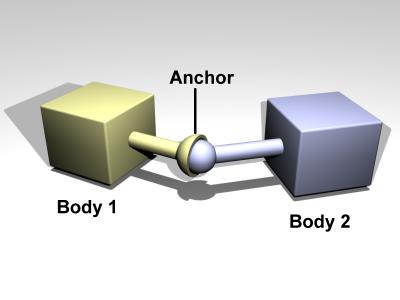
Ball
-
A ball and socket joint between 2 rigid bodies :
-
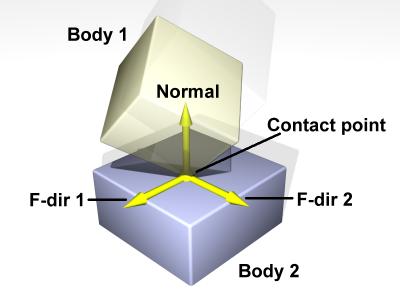
Contact
-
A Contact joint between 2 rigid bodies or an rigid body and {ODE.Geom} collider
-
Fixed
-
A Fixed joint between 2 rigid bodies (zero liberties between them). The fixed joint maintains a fixed relative position and orientation between two bodies, or between a body and the static environment. Using this joint is almost never a good idea in practice, except when debugging. If you need two bodies to be glued together it is better to represent that as a single body.
-
Hinge
-
A hinge joint between 2 rigid bodies
-
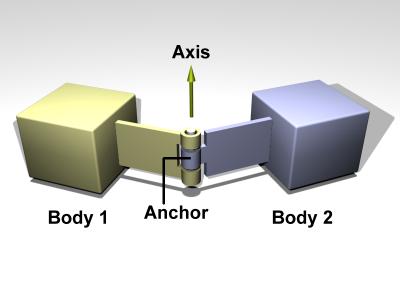
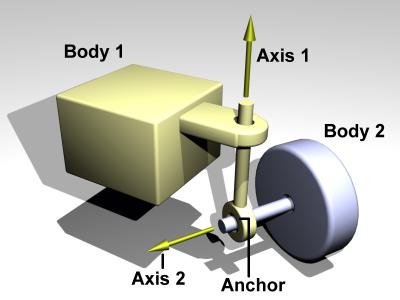
Hinge2
-
A Hinge2 joint between 2 rigid bodies
-
Null
-
A Null joint between 2 rigid bodies (full liberties between them).
-
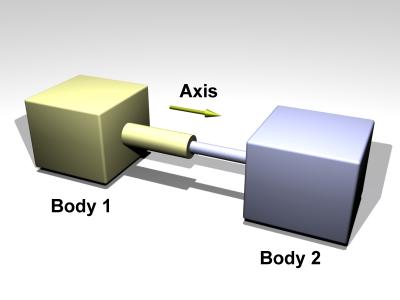
Slider
-
A Slider joint between 2 rigid bodies
-
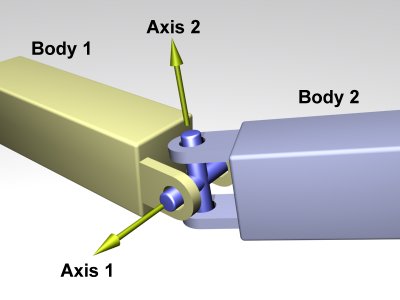
Universal
-
A Universal joint between 2 rigid bodies
-
Unknown
-