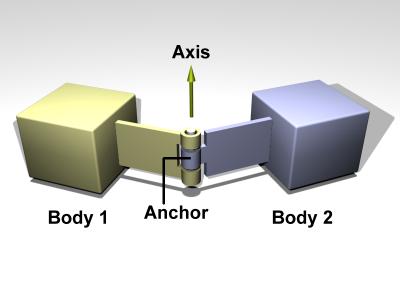
abstractnew ODE.Joint.HingeJoint()
Extends
- ODE.Joint.Prototypes.AnchorJoint
- ODE.Joint.Prototypes.AxisJoint
- ODE.Joint.Prototypes.ParametersJoint
- ODE.Joint.Prototypes.AngleJoint
Members
-
readonlytypeODE.Joint.Types
-
get the type of this joint
Methods
-
Attach the joint to some new bodies. If the joint is already attached, it will be detached from the old bodies first. To attach this joint to only one body, set body1 or body2 to zero - a zero body refers to the static environment. Setting both bodies to zero puts the joint into "limbo", i.e. it will have no effect on the simulation. Some joints, like hinge-2 need to be attached to two bodies to work.
Name Type Description b1ODE.Body the first body
b2ODE.Body the second body
Returns:
Type Description ODE.Joint -
inherited destroy()
D:/work/ODE.js/lib/ode.js, line 645 -
clear memory space in LLVM heap
-
inherited getAnchor(){Array.<Number>}
D:/work/ODE.js/lib/ode.js, line 699 -
Get anchor position as array [x, y, z ]
Returns:
Type Description Array.<Number> -
inherited getAngle(){Number}
D:/work/ODE.js/lib/ode.js, line 751 -
get angle, measured between the two bodies, or between the body and the static environment. The angle will be between -pi..pi.
Returns:
Type Description Number -
inherited getAngleRate(){Number}
D:/work/ODE.js/lib/ode.js, line 757 -
get the time derivative of the angle
Returns:
Type Description Number -
inherited getAxis(){Array.<Number>}
D:/work/ODE.js/lib/ode.js, line 725 -
Get axis orientation as vector3
Returns:
Type Description Array.<Number> -
Return the bodies that this joint connects. If idx is 0 the first body will be returned, corresponding to the first body argument of ODE.Joint.Prototypes.BaseJoint#attach. If idx is 1 the second body will be returned, corresponding to the second body argument of ODE.Joint.Prototypes.BaseJoint#attach.. If one of these returned body IDs is zero, the joint connects the other body to the static environment. If both body IDs are zero, the joint is in ``limbo'' and has no effect on the simulation.
Name Type Description idxNumber Returns:
Type Description ODE.Body | null -
inherited getParam(parameter){Number}
D:/work/ODE.js/lib/ode.js, line 743 -
get limit/motor parameter
Name Type Description parameterODE.Joint.Parameters Returns:
Type Description Number -
inherited getPointer(){Number}
D:/work/ODE.js/lib/ode.js, line 638 -
get offset address in heap memory
Returns:
Type Description Number -
Set anchor position
Name Type Description xNumber yNumber zNumber Returns:
Type Description ODE.Joint -
set axis orientation
Name Type Description xNumber yNumber zNumber Returns:
Type Description ODE.Joint -
set limit/motor parameter
Name Type Description parameterODE.Joint.Parameters valNumber Returns:
Type Description ODE.Joint